Op grond van de criteria zijn we tot een ontwerp gekomen, opgedeeld in een idee voor
de grijparm en een idee voor de grijpklauw.
De grijparm
De paralellogram scoorde punten op de volgende criteria die relevant waren voor de grijparm:
De beker blijft stabiel. De stang aan het uiteinde van de paralellogram blijft altijd verticaal,
zodat de grijpklauw ook een constante hoek maakt met het horizontale en verticale vlak.
De inhoud moet kunnen uitsteken. De parallellogram belemmert het eventuele uitsteken uit het bekertje niet.
Actuatoren laten kraan heel. De parallellogram is een sterke en simpele vorm,
zodat de kans dat de kracht van de grijper een stang kapot maakt, klein is.
Bouwtijd. De parallellogram is snel te bouwen.
Startpositie hoogste stand. Dit zou geen problemen opleveren met de gekozen grijparm.
Tilmassa max 0,5kg. Hoewel de massa van de bekertje een moment veroorzaakt,
hebben we berekend dat de kracht van de actuator groot genoeg zou zijn
om een groter moment in de andere richting op te wekken.
Makkelijk op te bouwen. De parallellogram is een simpel systeem die we makkelijk zouden kunnen opbouwen.
Kosten. Alleen de verbinding tussen actuator en stang(de stangkoplager),
de moeren en de draadstangen zouden geld gaan kosten.
Een nadeel van de paralellogram zou kunnen zijn dat de arm een grote eindschok
zou maken als de actuator wordt ingetrokken, daar moesten we dus een oplossing voor bedenken.
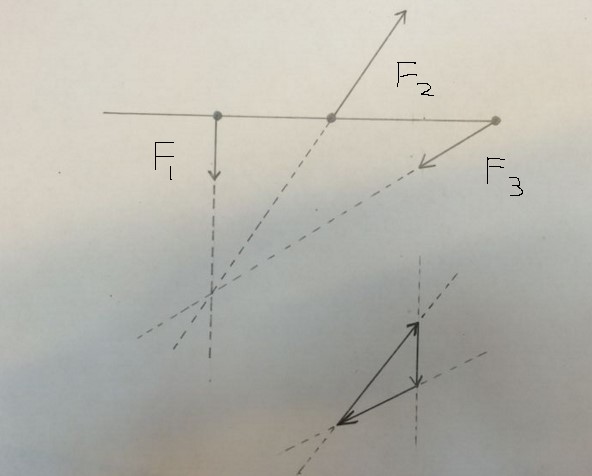
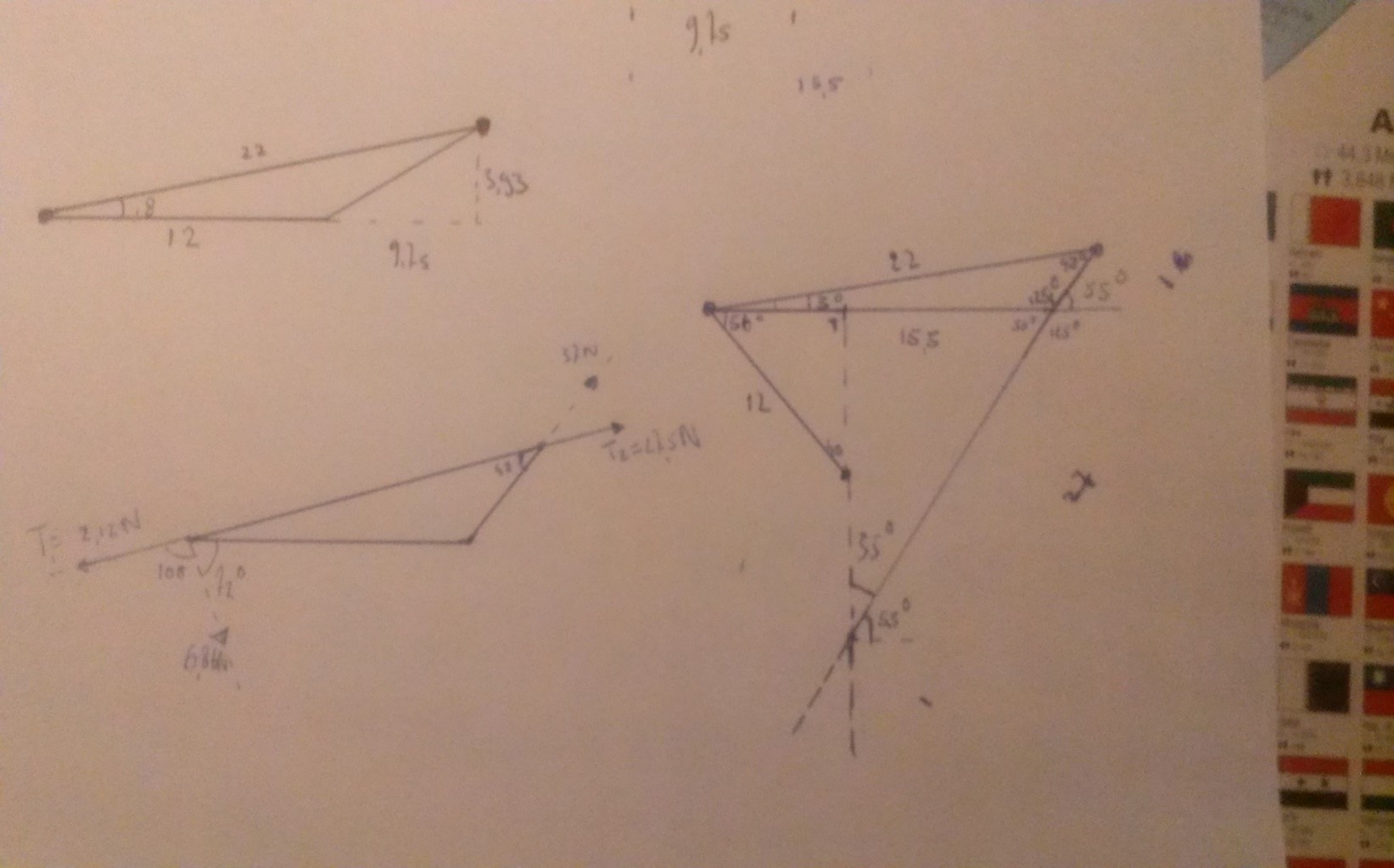
Hieronder is de krachtenanalyse van de arm
F1 = zwaartekracht
F2 = trekkracht van de actuator
F3 = de kracht van de wand op de arm
De grijpklauw
Voor de grijpklauw hebben we uiteindelijk een ander ontwerp gekozen dan de ontwerpen
die we in eerste instantie bedacht hadden. Dat hadden we gedaan omdat deze nog beter aan de eisen zou voldoen.
De beker blijft stabiel. De beker zou stabiel blijven tussen de elastieken,
omdat de zwaartekracht van het bekertje zelf zou zorgen dat het bekertje verticaal zou blijven hangen.
Inhoud moet kunnen uitsteken. Het concept zou eventueel uitsteken tot op zekere hoogte toestaan.
Actuatoren snel in te bouwen. Als we een stangkoplager zouden gebruiken voor
de bevestiging aan een draadstang, zou het een kwestie zijn van de actuator erin draaien.
Actuatoren laten kraan heel. Er zouden veel krachten ontwikkelen in de grijpklauw,
maar met het ontwerp zou het mogelijk zijn om de uit te snijden onderdelen erg robuust te maken.
Bouwtijd. De grijpklauw is in elkaar te zetten voor het testmoment, dus dit zou geen problemen moeten opleveren.
Kraan kan zich aanpassen aan vorm beker. Het ontwerp zou hier erg sterk in zijn,
omdat de elastieken zich vormen rond het bekertje.
Tilmassa max 0.5kg. De grijpklauw moest wel kunnen grijpen met voldoende kracht,
omdat anders de wrijvingskracht tussen beker en elastieken te klein zou zijn.
Die grijpkracht zou met elastieken behaald kunnen worden.
Makkelijk op te bouwen. Het ontwerp is niet heel complex, dus het zou makkelijk op te bouwen moeten zijn.
Kosten. De stangkoplager, draadstangen, bouten, moeren en elastieken zouden kosten zijn,
maar die komen neer op een paar euro per groepslid dus dat is overkomelijk.

Hieronder is de krachtenanalyse van de grijper:
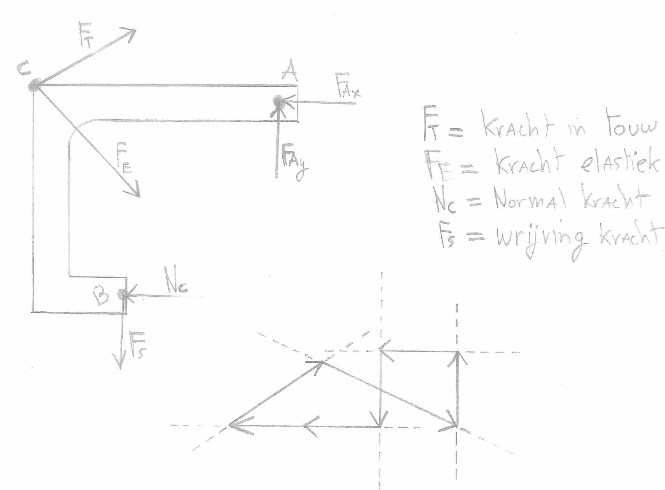
We gebruiken postelastieken om de beker vast te pakken. Het rubber van de postelastieken is
vrij stroef en zou dus voldoende wrijving moeten kunnen opwekken om de beker in evenwicht te kunnen
houden. We zijn er vanuit gegaan dat de grijper standaard kartonnen koffiebekertjes op zou tillen.
Daarom hebben we de wrijvingscoefficient van rubber op karton opgezocht en volgens
de site: ('http://www.engineeringtoolbox.com/friction-coefficients-d_778.html')
zit deze tussen de 0.5 en 0.8 (rubber on cardboard). Gemiddeld is dat dus 0.65.
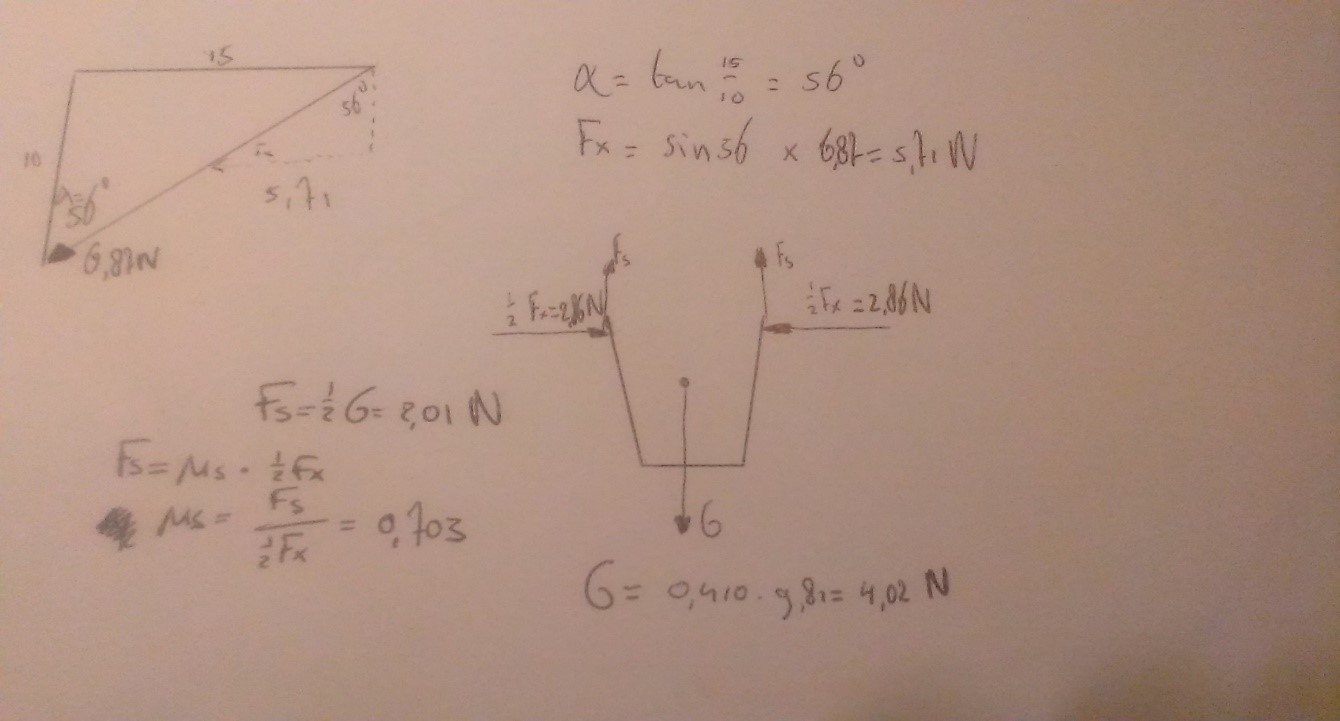
We hebben afgeleid dat de spankracht van een sluitelastiek om de grijpklauw te sluiten gelijk is aan:
Fspan= (m*g)/(2mu(s)*sin(alfa) ) met m als massa van de beker, g de valversnelling,
mu(s) de wrijvingscoefficient en alfa de hoek tussen het sluitelastiek en de y-as.
De massa van het bekertje bedraagt maximaal 0.5kg en uit de dimensies
van de grijper volgt dat alfa gelijk is aan 56 graden.
Als we deze gegevens invullen in de formule, volgt dat Fspan gelijk is aan 4.16N
We hadden een normaal elastiekje zover mogelijk uitgerekt en met een veerunster gemeten
dat deze een veerkracht kon leveren van ongeveer 1.49N. Dit betekent dus dat we in ieder geval
3 elastiekjes moeten gebruiken per aan elke kant om aan de 4.16N te kunnen komen.
We wilden ook weten hoe sterk het touw zou zijn dat we spannen tussen de kleine actuator en de grijpklauw.
We gebruiken nylon touw met een diameter van 1mm en volgens CES Edupack heeft nylon een tensile strength
van 90 tot 165 MPa, dus gemiddeld 127.5 MPa.
Als we dit omrekenen betekent het dus dat het touw een maximale spankracht van ongeveer 100,1N kan weerstaan.
Het practicum
In het practicum hebben we getest hoe onze grijper werkte
en hebben we ook verschillende metingen gedaan.
Met deze metingen willen we onder andere de wrijvingscoefficient van de postelastieken
en de spankracht van het touw tussen de actuator en de grijpklauw berekenen
en deze resultaten vergelijken met de waarden die we van te voren berekend of opgezocht hadden.
Metingen van het practicum
Tilhoogte: 25.3cm
Getilde massa: 0.410kg
Lengte sluitelastiek bij gesloten grijper: 12cm
Lengte sluitelastiek bij open grijper: 19cm
Hoeken van actuatoren met de x-as: 55 graden
Spankracht van het sluitelastiek: 3.43N De spankracht van het sluitelastiek hebben we gemeten
met behulp van een veerunster door het elastiek even ver uit te rekken als bij de grijper.
Met deze gegevens kunnen we gaan rekenen. Voor de wrijvingscoefficient van het postelastiek geldt:
mu(s)= (m*g)/(2Fspan*sin(alfa) ) Waarbij m de massa van de beker,
g de valversnelling, Fspan de spankracht van het sluitelastiek
en alfa de hoek is die het sluitelastiek maakt met de y-as. alfa is 56 graden. Hieruit volgt:
mu(s)= (0.410*9.81)/(2*3.43*sin(56) ) = 0.703
Als we deze waarde vergelijken met de wrijvingscoefficient die we hebben opgezocht (0.5-0.8), dan valt deze dus binnen de marge.
Ook kunnen we met de gegevens de spankracht in het touw berekenen.
We weten door het eerste practicum dat de kleine actuator een kracht van ongeveer 37N kon leveren.
Door te meten weten we dat deze kracht onder een hoek staat van 42 graden ten opzichte van het touw.
Aan de kant van de actuator werkt dus een kracht van 37*cos(42)=27.5N. De spankracht in het touw is dus gelijk aan 27.5N.
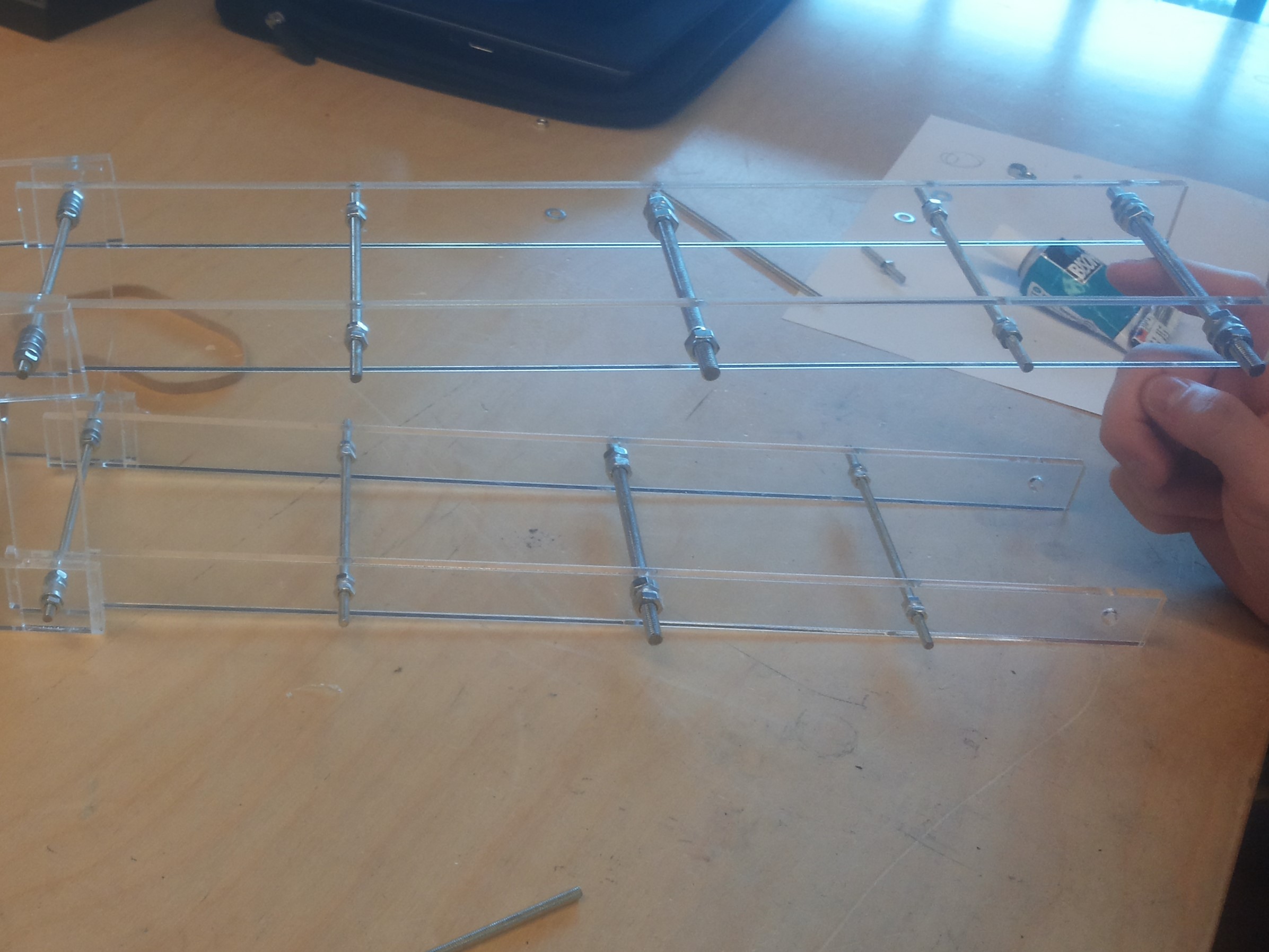
de grijper is gemaakt met de volgende onderdelen:
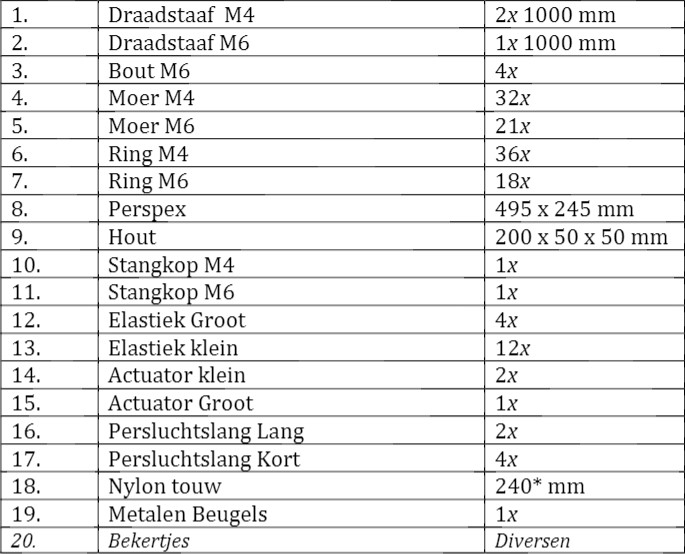
* Benodigde lengte touw: 220mm. Voor knoopbevestiging word per kant ca. 10mm gereserveerd.
Keuze voor materiaal:
We hebben gekozen om de arm van perspex te maken omdat dat een licht materiaal
is maar toch erg sterk. Hierdoor kost het dus niet veel kracht om de arm zelf op te tillen.
en de tussenstangen van draadstaal omdat dat erg sterk is.